Lo studio del comportamento degli sciami di api nei processi decisionali – come ad esempio la ricerca di un nuovo sito dove stabilirsi – può rivelarsi utile anche nella progettazione di robot capaci di auto organizzarsi e di adattarsi ai cambiamenti improvvisi dell’ambiente circostante. Approccio importante se si pensa alla realizzazione di squadre robotiche di salvataggio, che devono essere in grado di operare in condizioni ambientali instabili.
Una ricerca congiunta dell’Istituto di scienze e tecnologie della cognizione del Consiglio nazionale delle ricerche (Istc-Cnr) di Roma, dell’Institut de recherches interdisciplinaires et de développements en intelligence artificielle (Iridia) e la faculté de sciences de l’Université libre de Bruxelles, pubblicata su “PLOS ONE”, ha messo a punto un nuovo strumento che “permette allo sviluppatore di scegliere le dinamiche complessive che vuole ottenere e fornisce automaticamente i parametri da utilizzare nell’algoritmo di funzionamento di ogni singolo dispositivo dello sciame”, spiega Vito Trianni, ricercatore dell’Istc-Cnr. I ricercatori sono stati mossi dalla necessità di ridurre al minimo eventuali sviluppi indesiderati. “La difficoltà sta nel controllare la risposta complessiva di migliaia di dispositivi autonomi, capaci di comunicare tra loro ma che a volte danno luogo a comportamenti emergenti difficilmente prevedibili”, aggiunge Trianni.
La robotica di sciame (swarm robotics) parte dal presupposto che nessuno dei singoli robot abbia una visione complessiva dello sciame stesso e che quindi nessuno degli elementi abbia un ruolo privilegiato rispetto agli altri. La chiave sta nella capacità dei singoli di comunicare con i propri simili. Da qui l’analogia con le api, Trianni specifica: “La ricerca per un nuovo sito di nidificazione viene portata avanti in parallelo da più api ‘scout’. Tutte le alternative che vengono identificate sono comunicate ad altre api scout dello sciame, le quali vengono reclutate per valutare la qualità delle scelte disponibili. Quindi, la popolazione di api scout si divide tra le differenti soluzioni, con una distribuzione che cambia nel tempo a seconda della qualità delle alternative stesse, in modo da favorire le migliori”.
Le applicazioni – osserva il Cnr – sono molteplici dal momento che la metodologia proposta è applicabile a qualunque sistema, anche non robotico, in cui più dispositivi autonomi devono coordinarsi per portare a termine un compito senza disperdersi tra le differenti possibilità: dalle missioni di salvataggio e ricerca alle esplorazioni spaziali, ma anche agricoltura di precisione o smart energy grids.
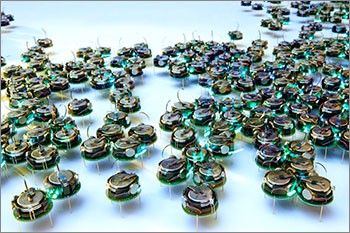
Credits: foto wyss.harvard.edu


